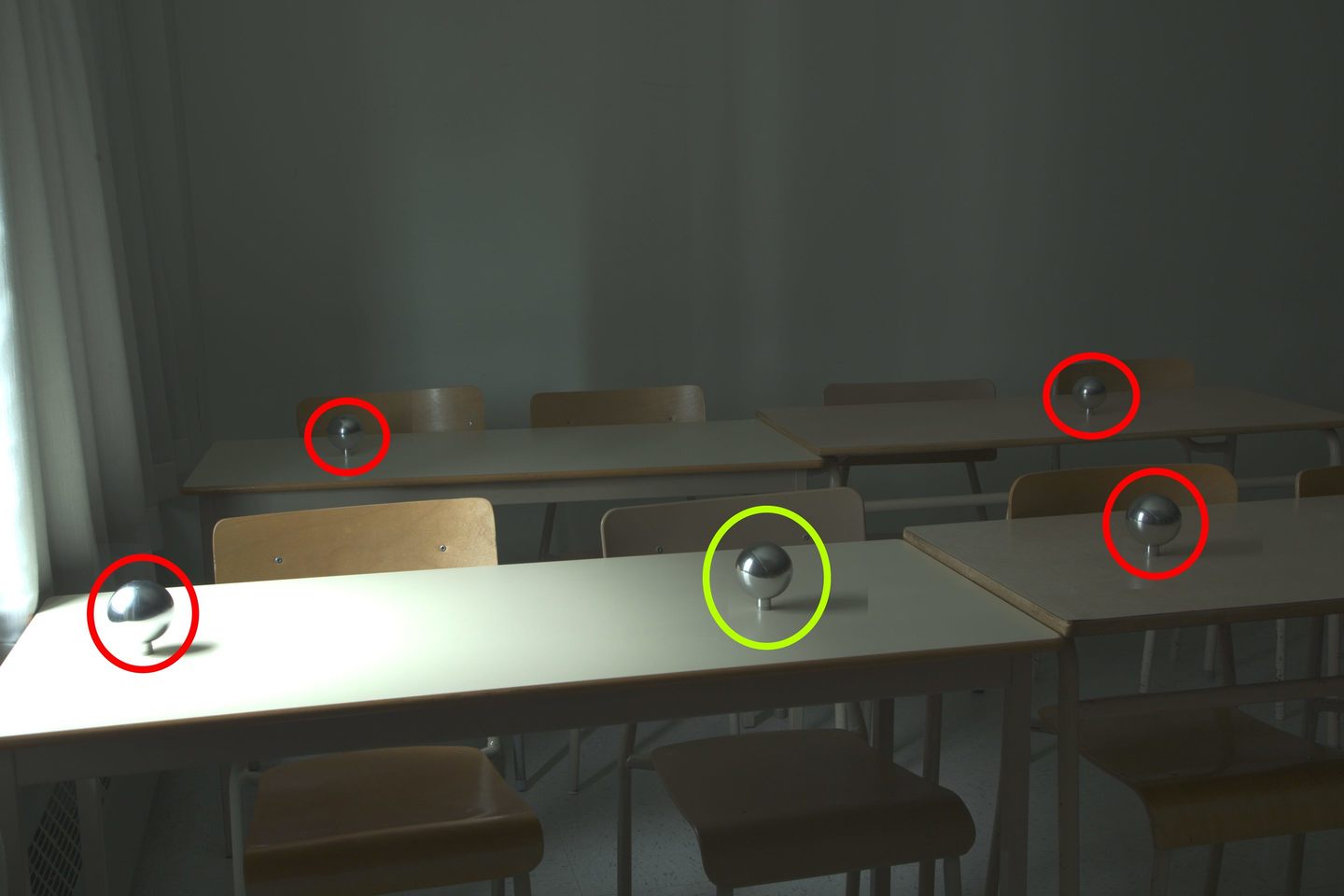
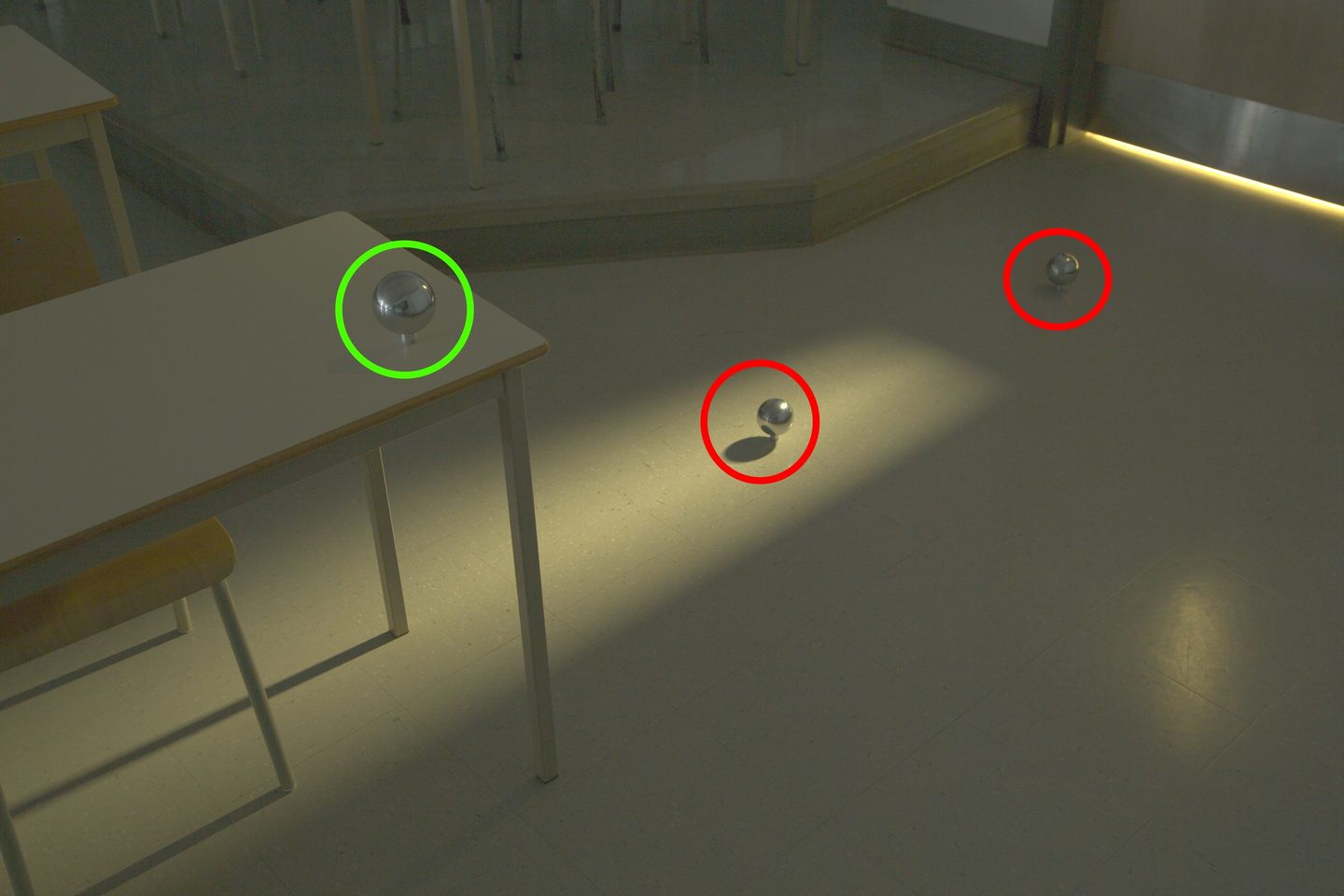
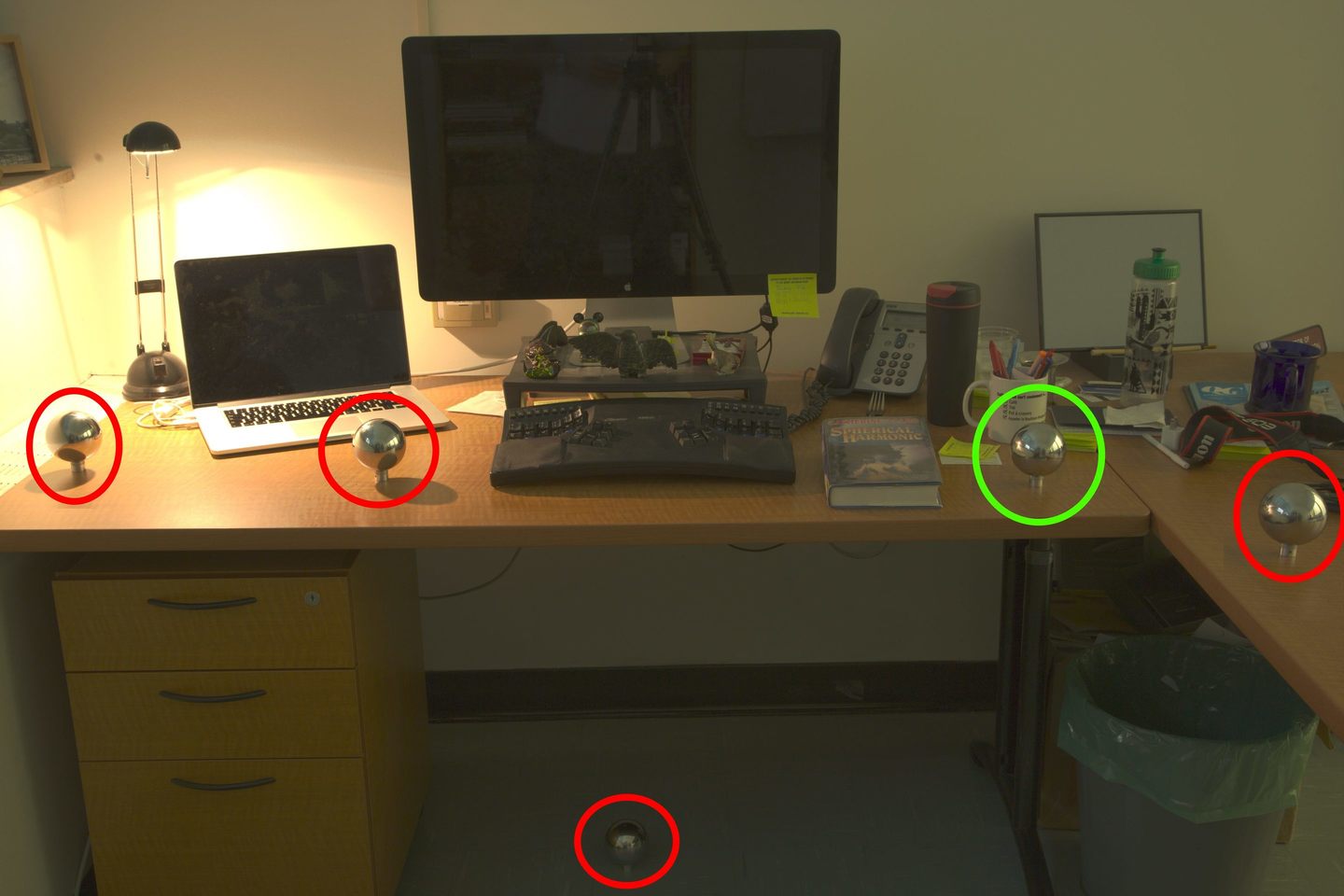
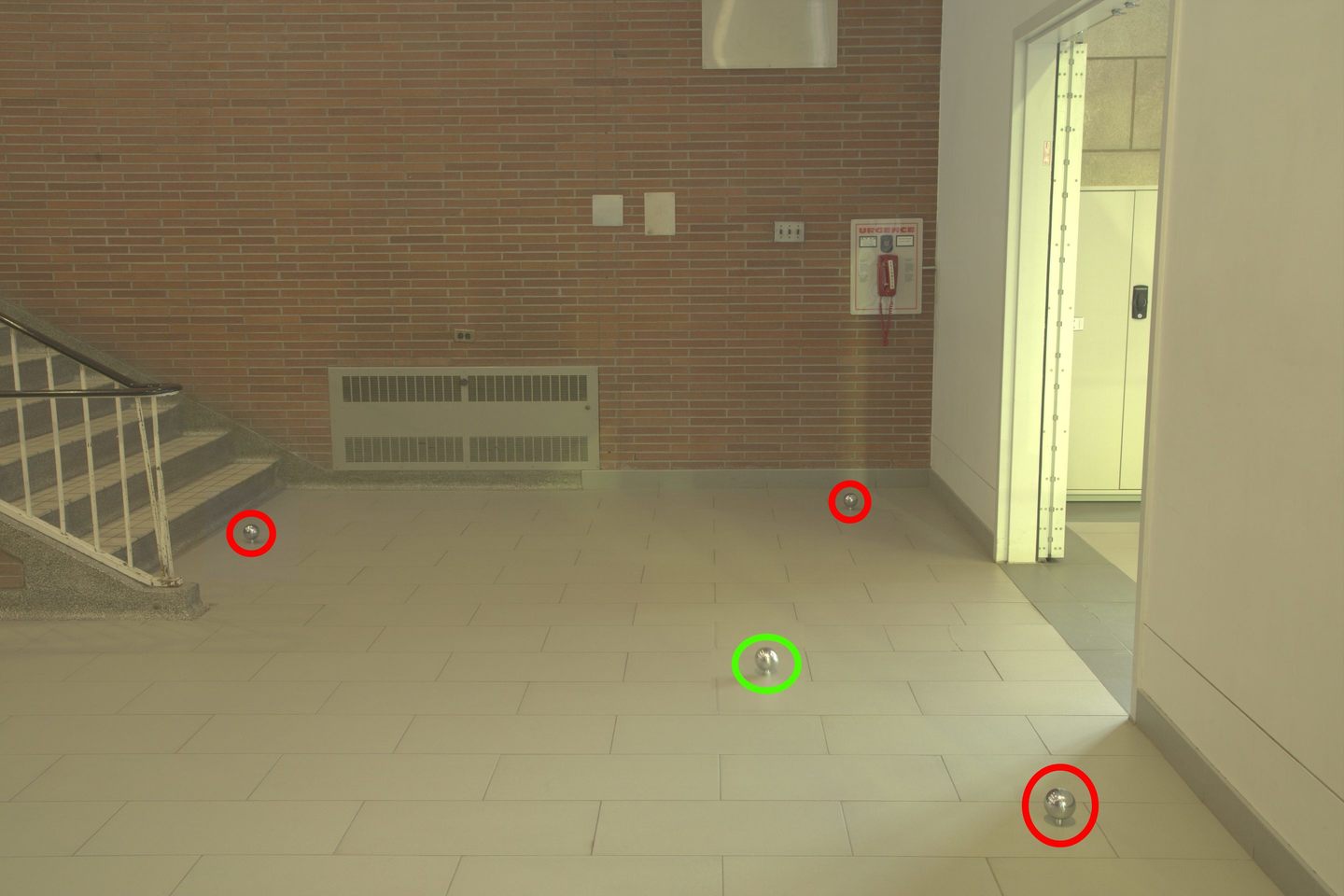
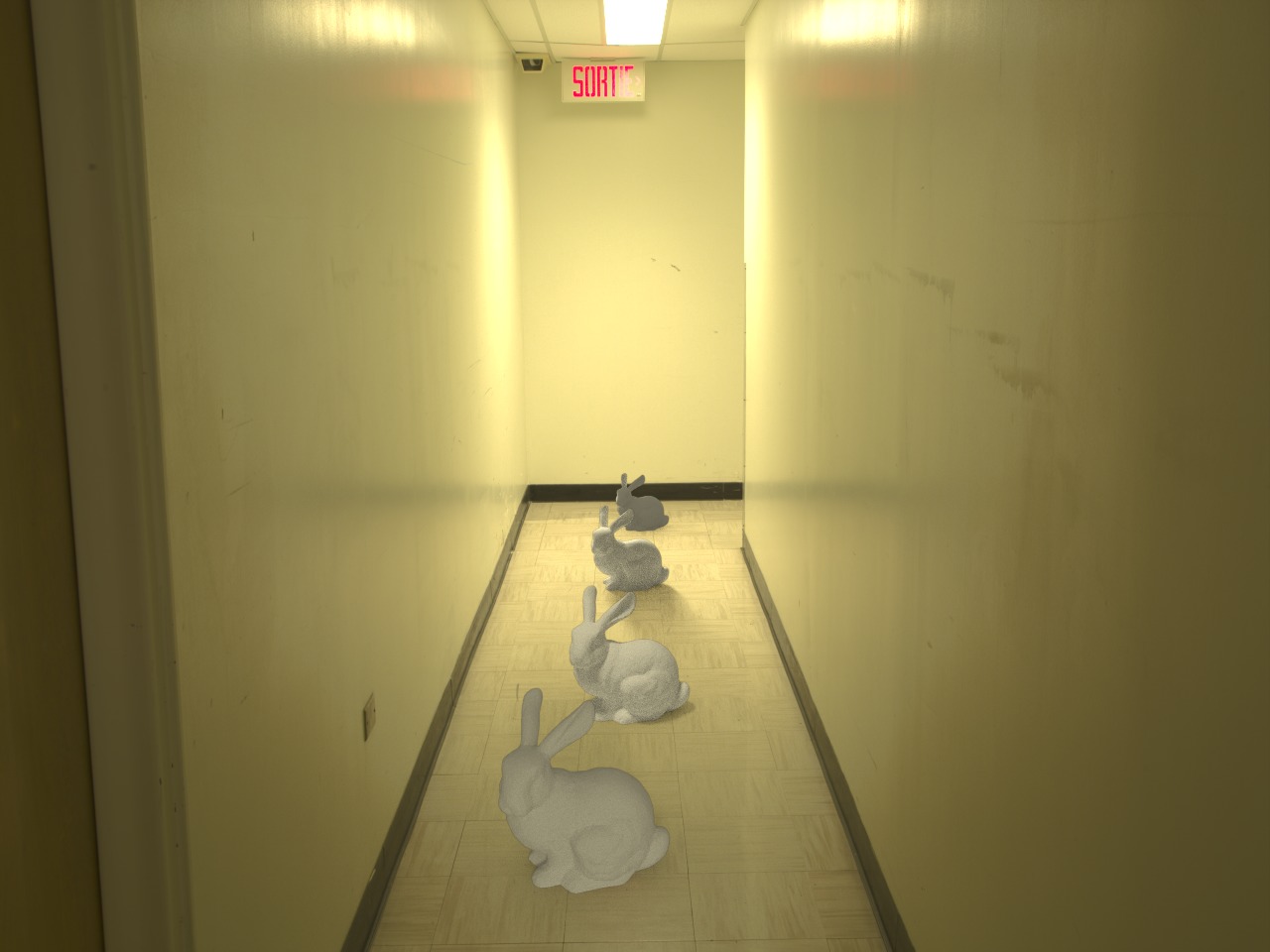
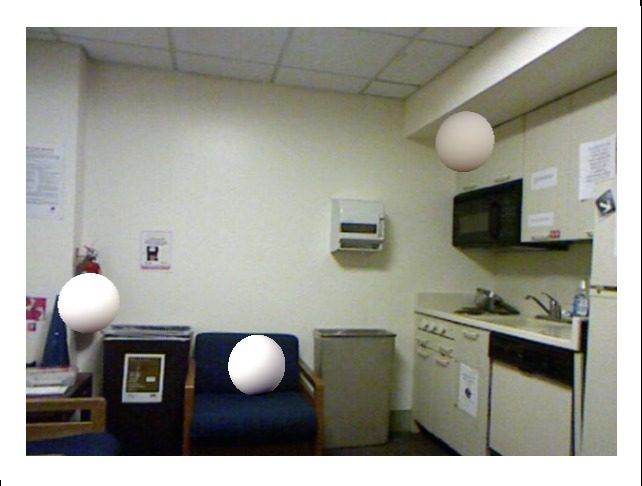
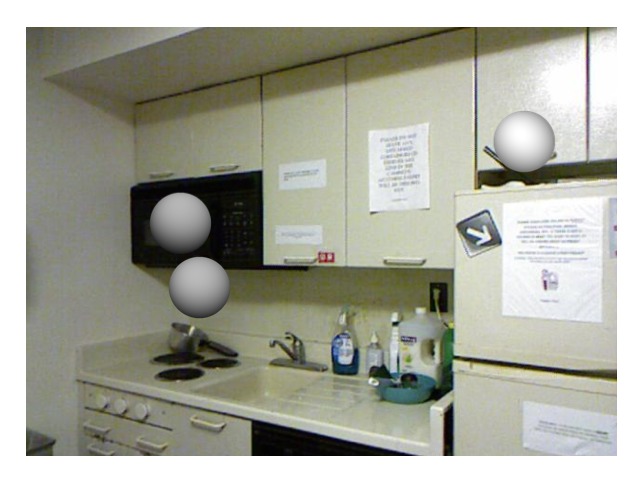
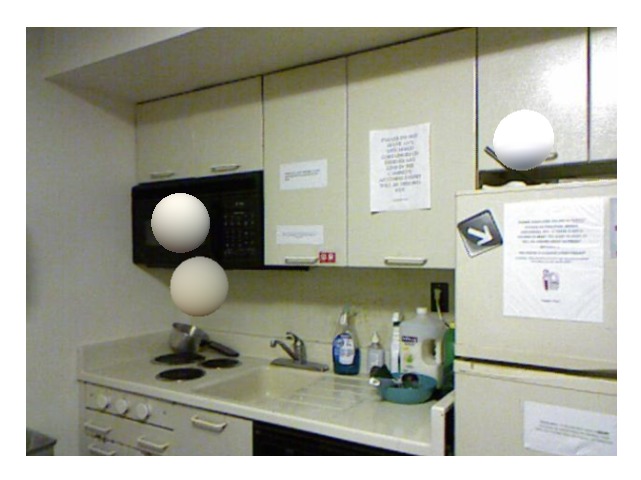
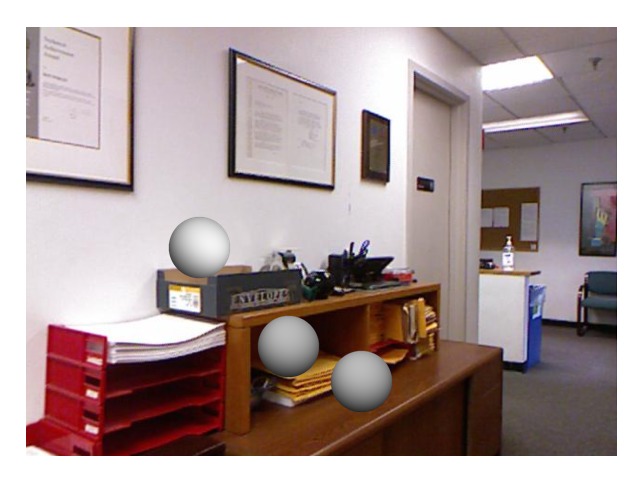
Evaluation dataset: backgrounds and probes
- Hover the image to see the probes, center probes are green and off-center probes are red.
- Click to enlarge the image.
- Note that the center probes (green) are selected empirically by determining which probes reflect the best the average lighting in the room.
















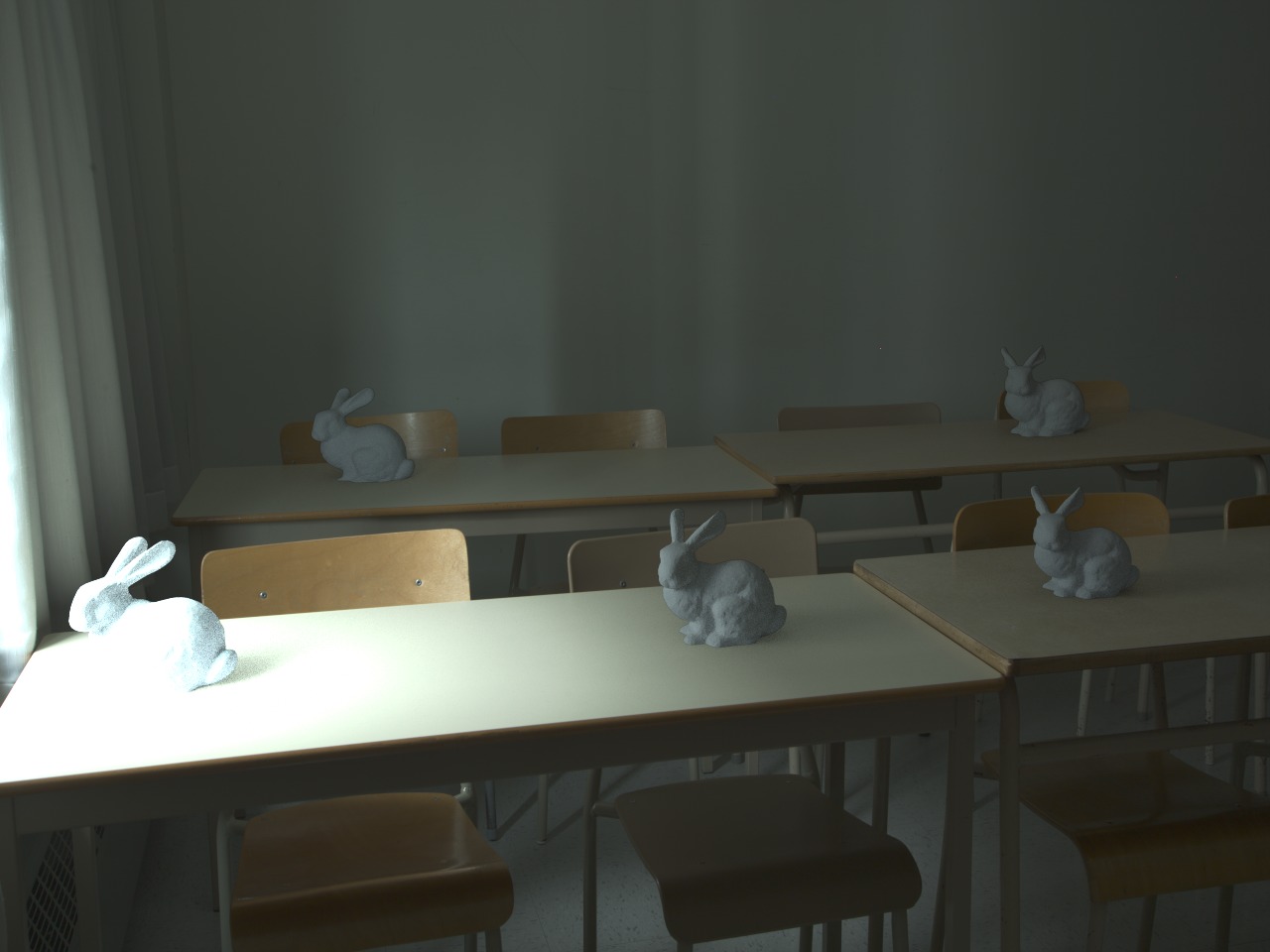
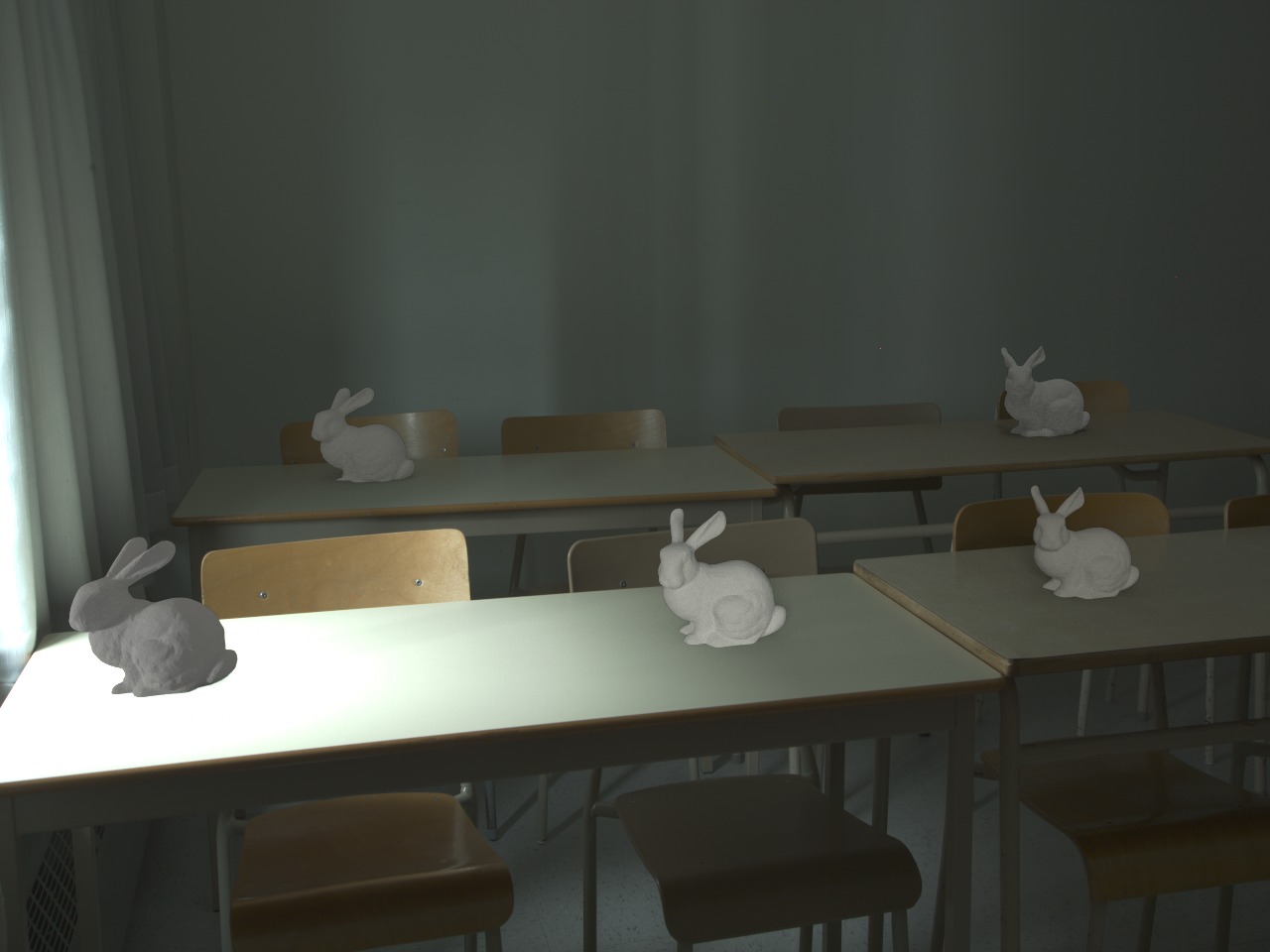
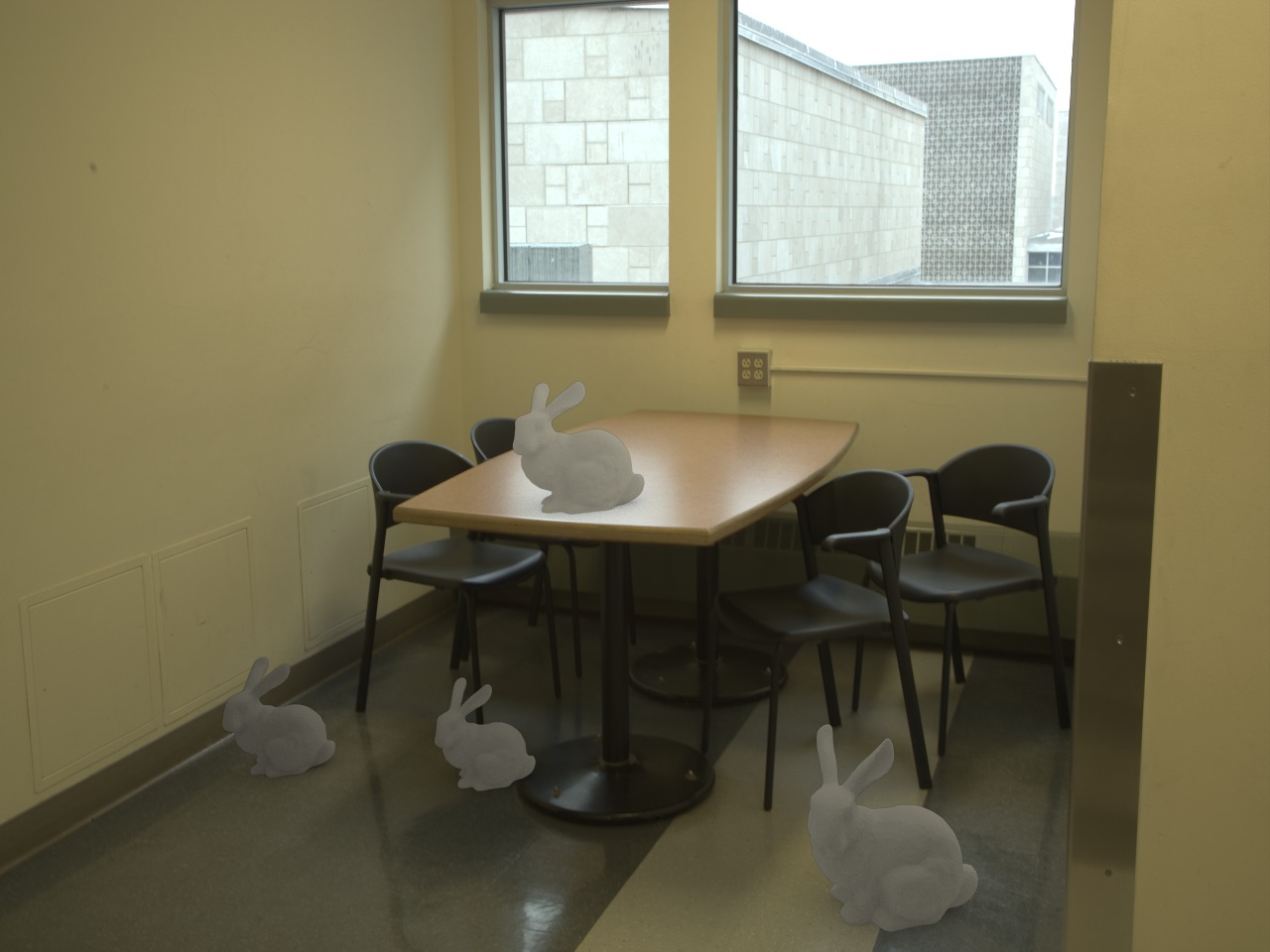
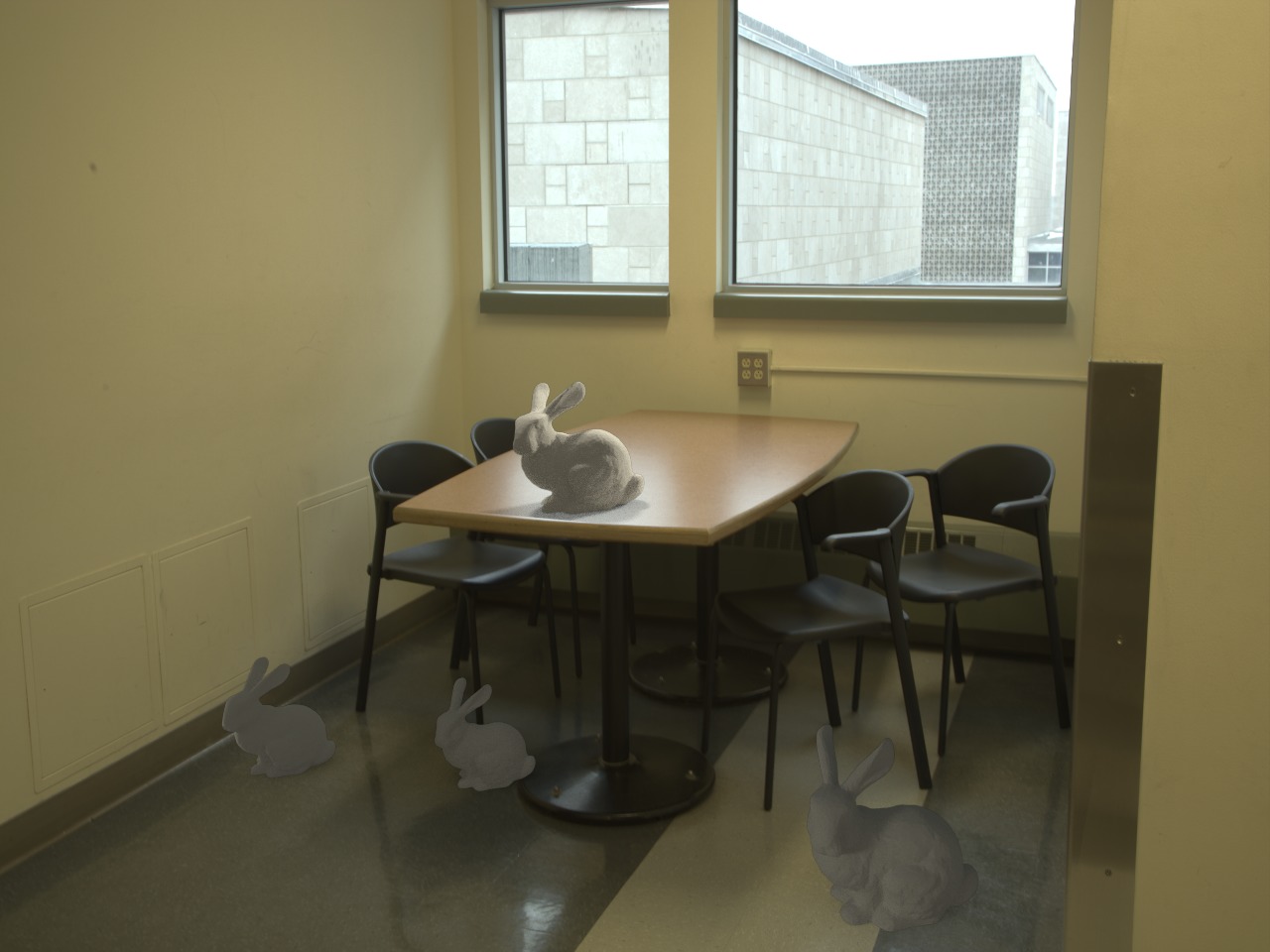
Comparison with Gardner et al. 2017
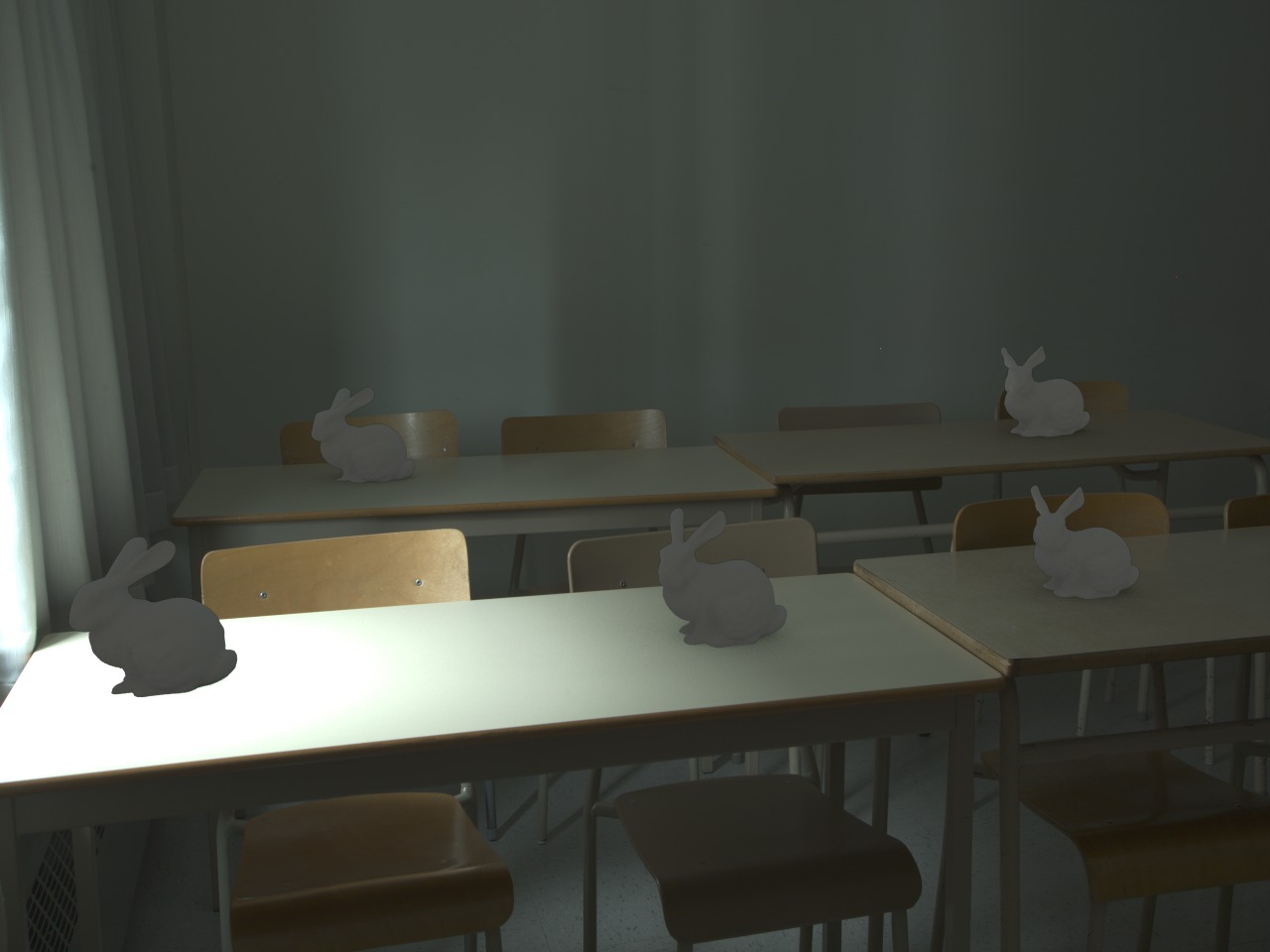
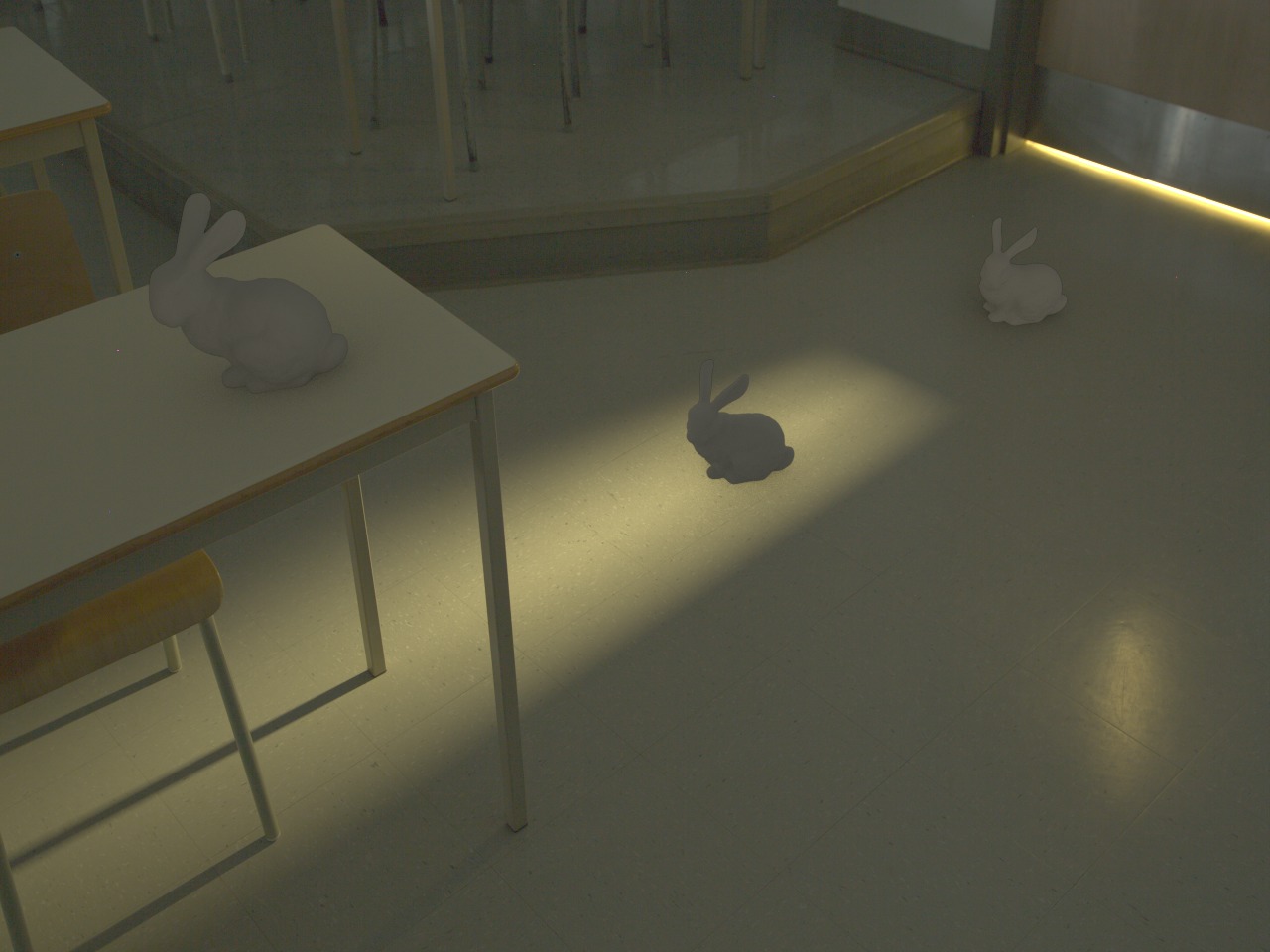
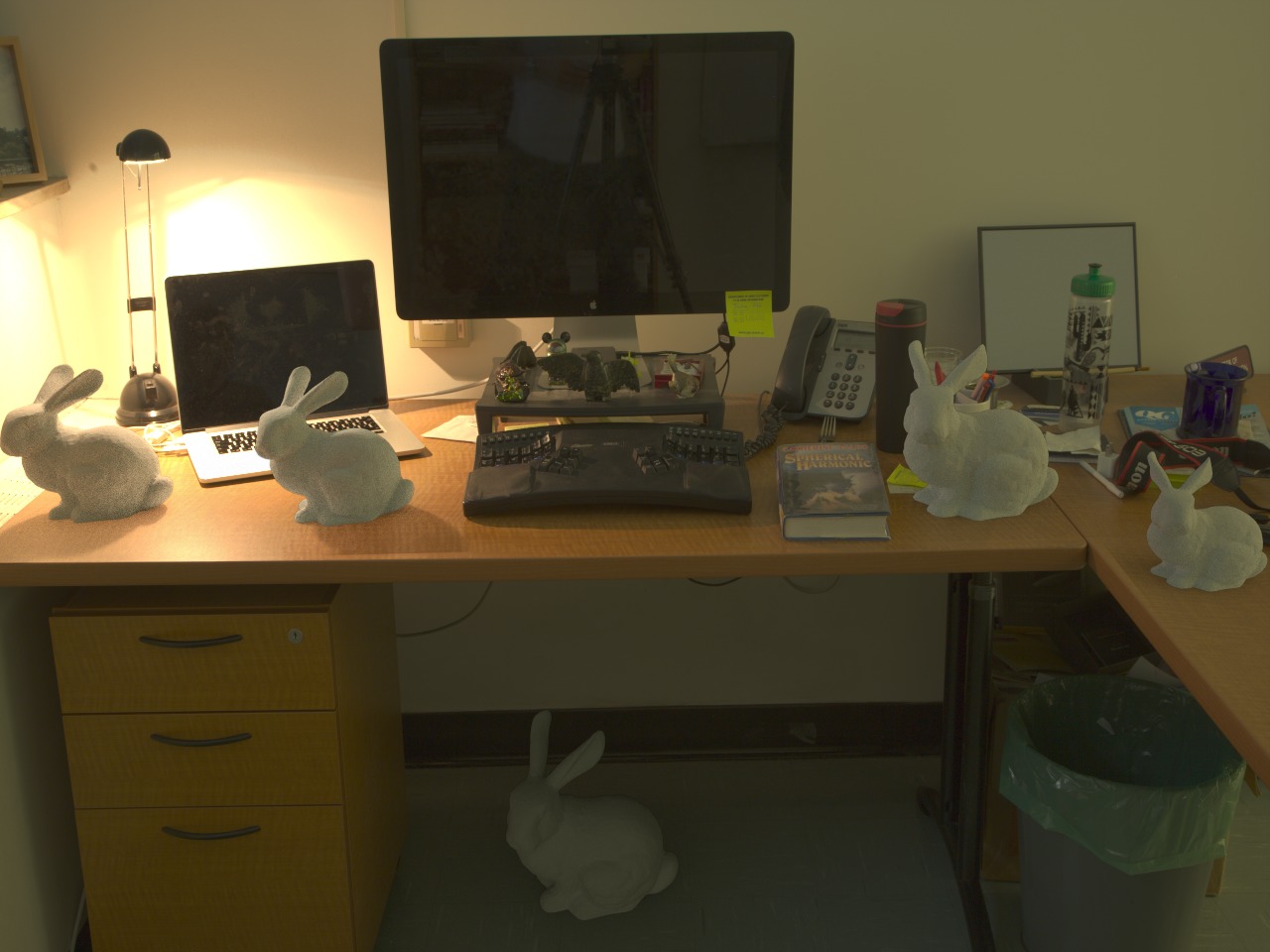
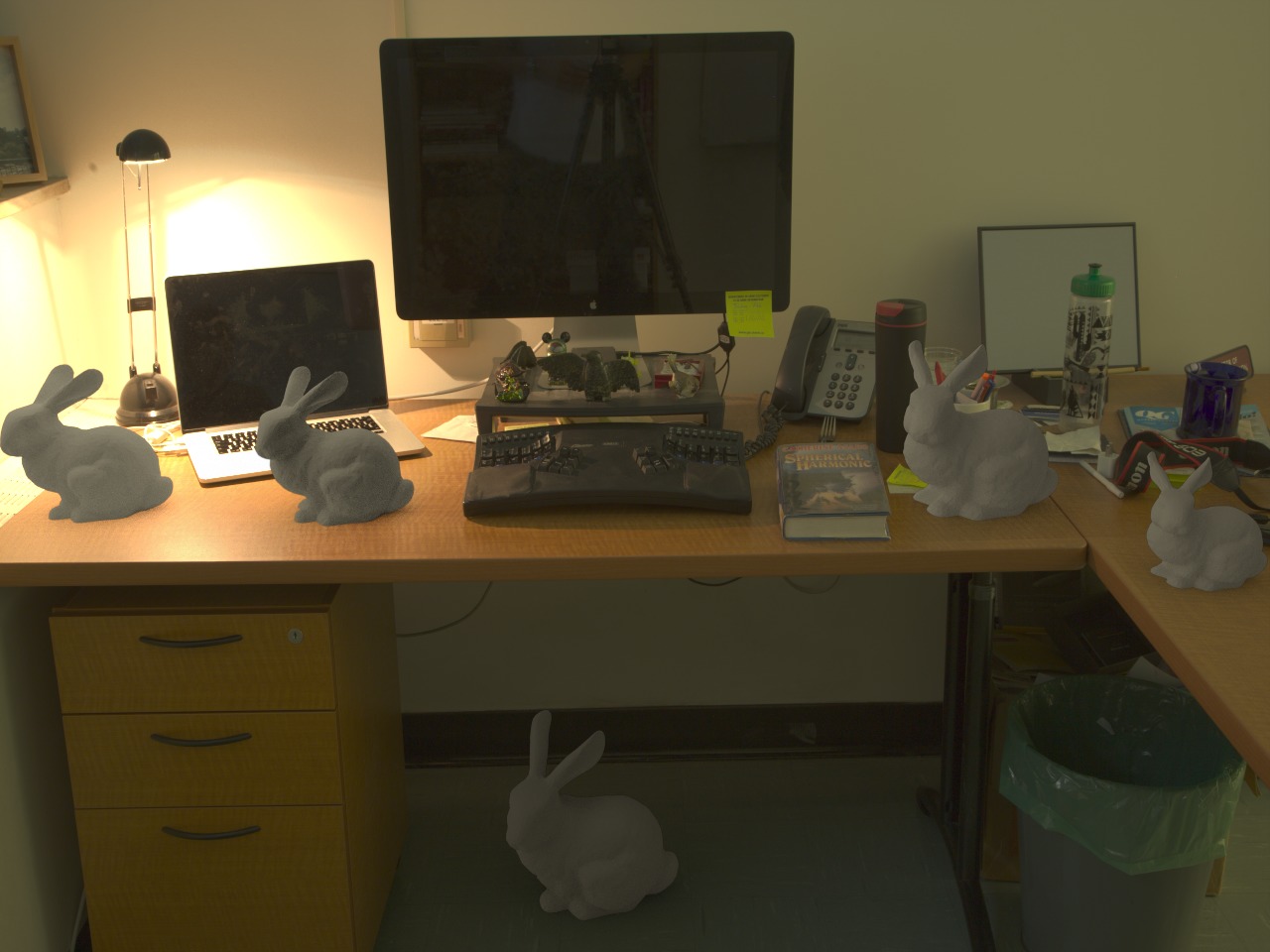
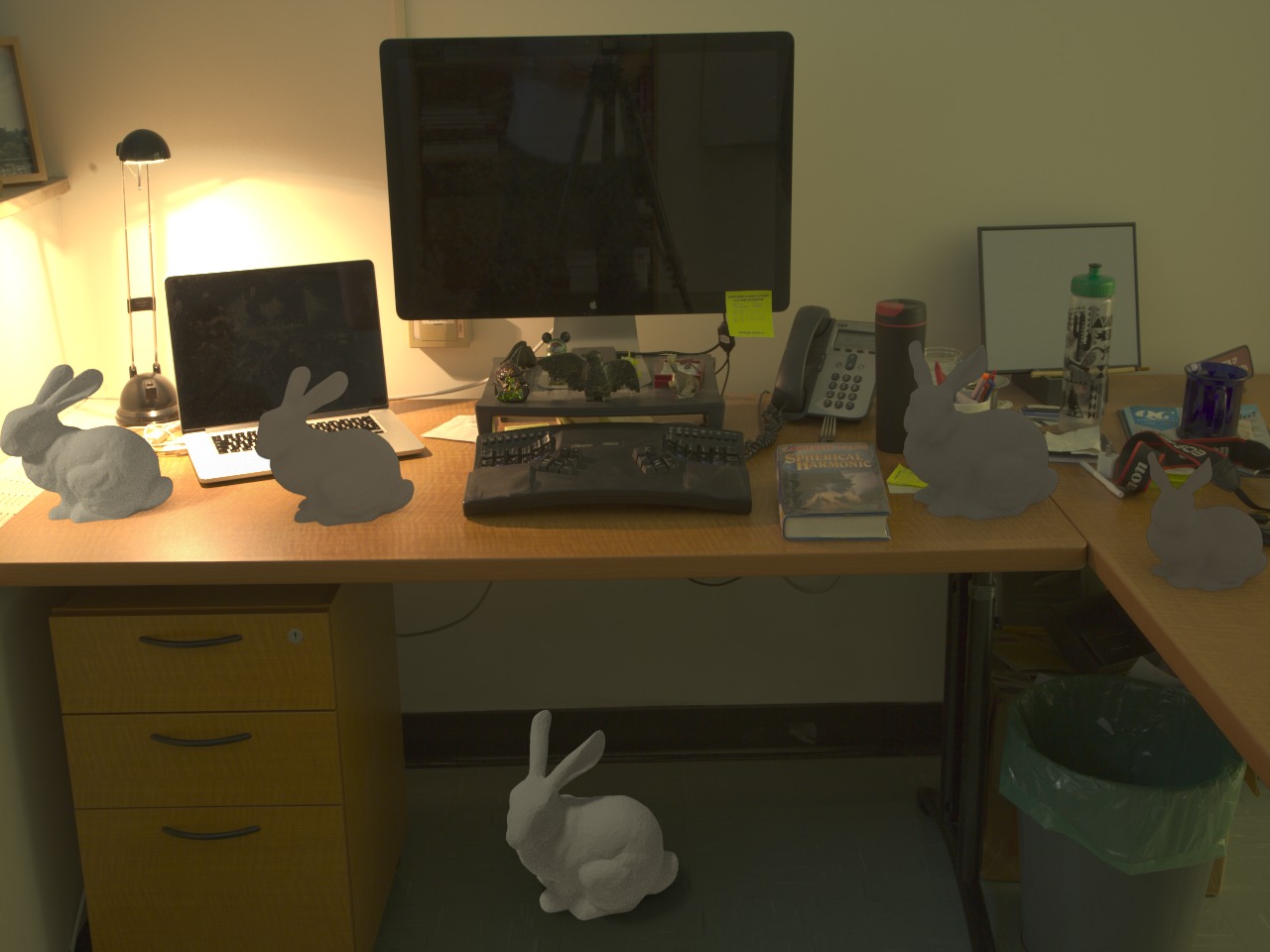
- Hover the ground truth image to see the virtual object mask.
- Click to enlarge the image.




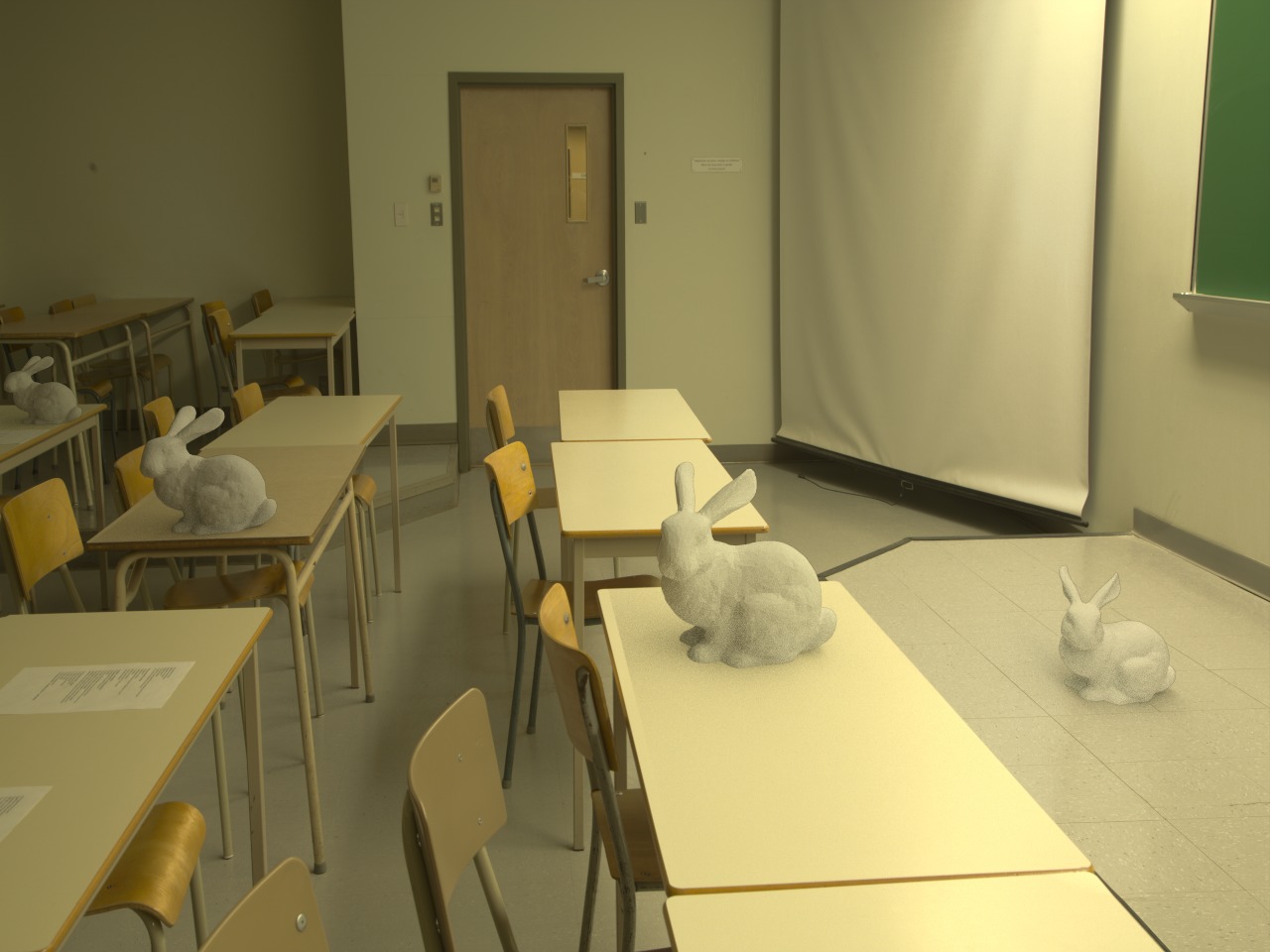
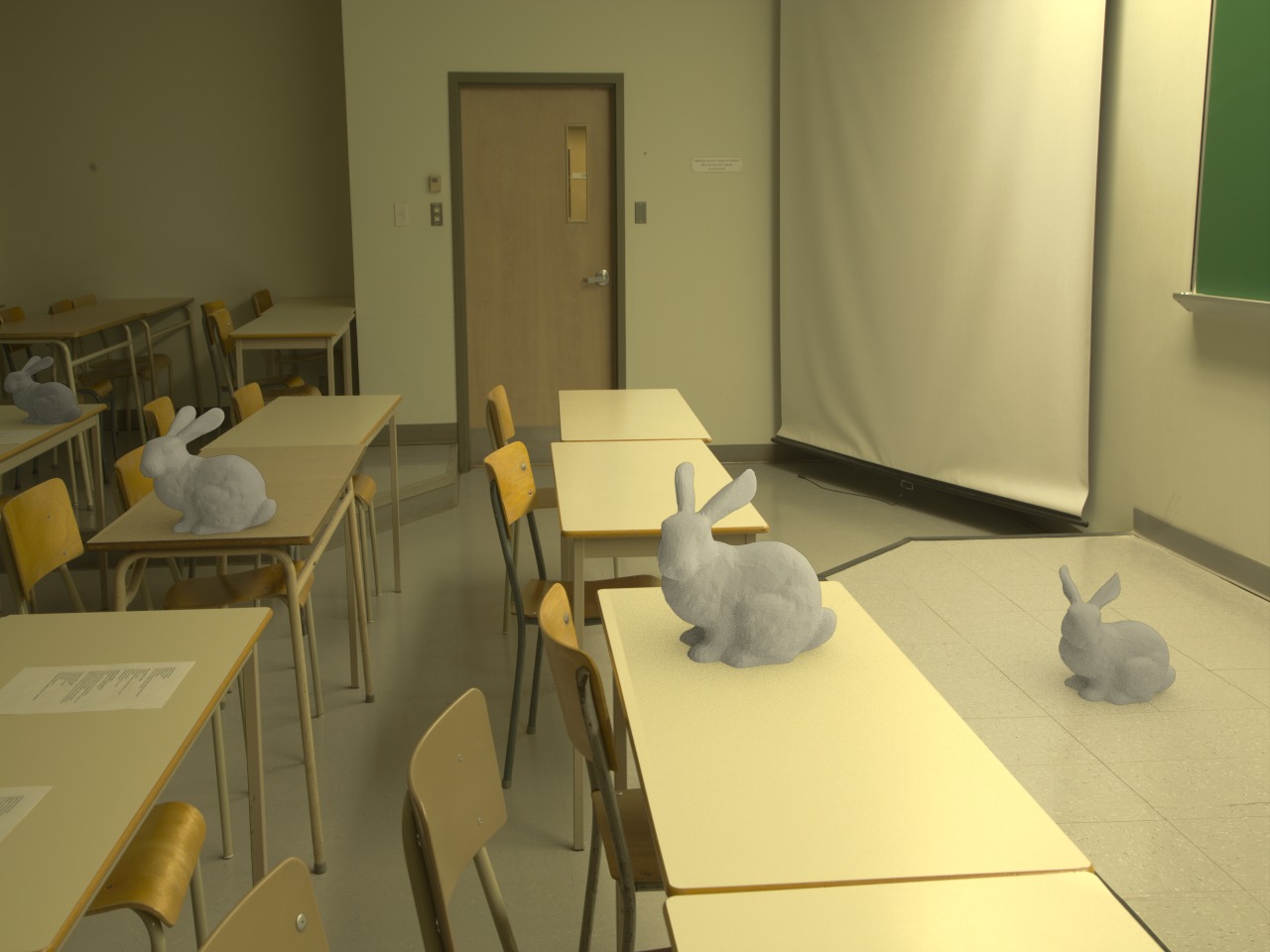
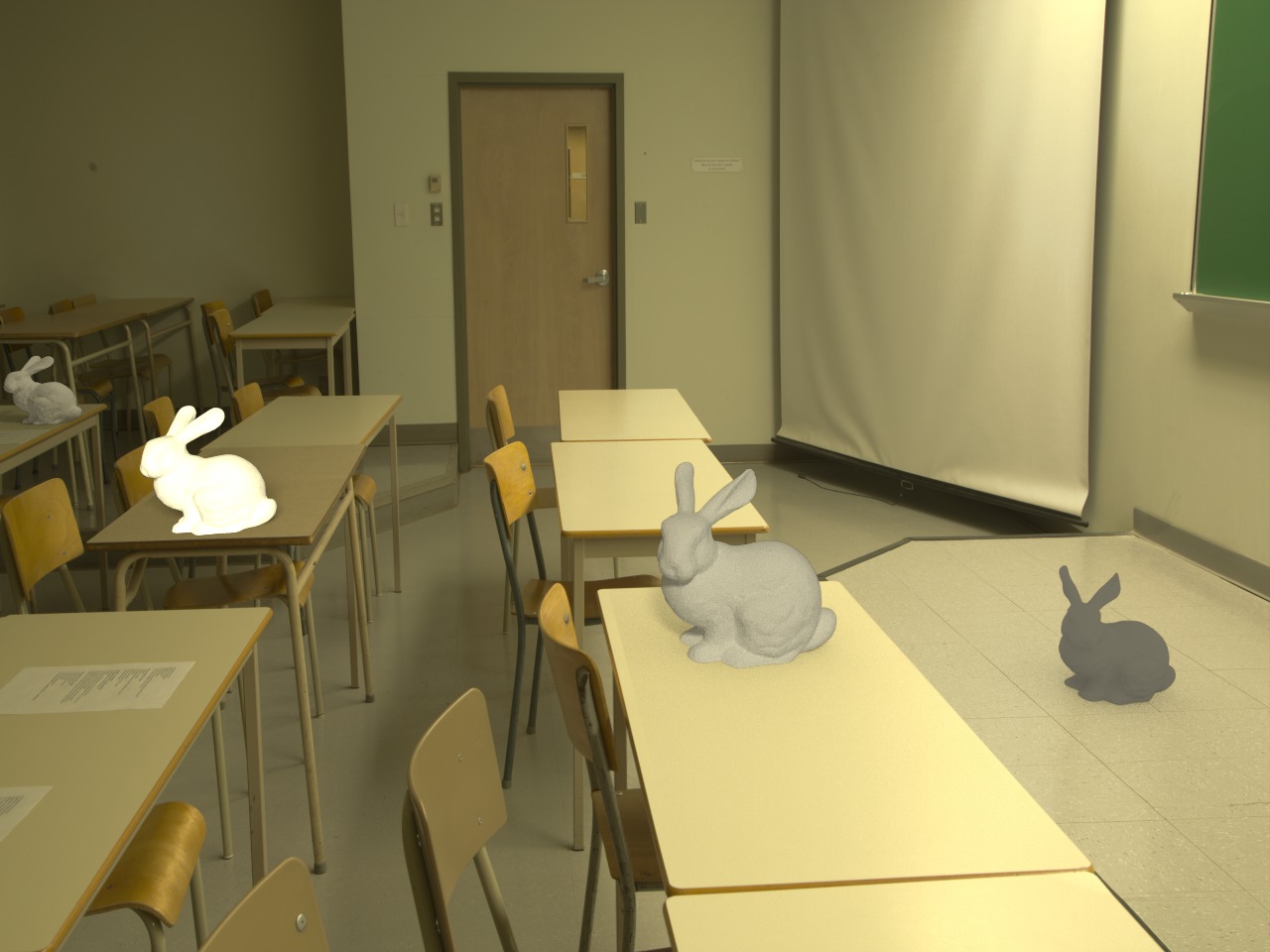
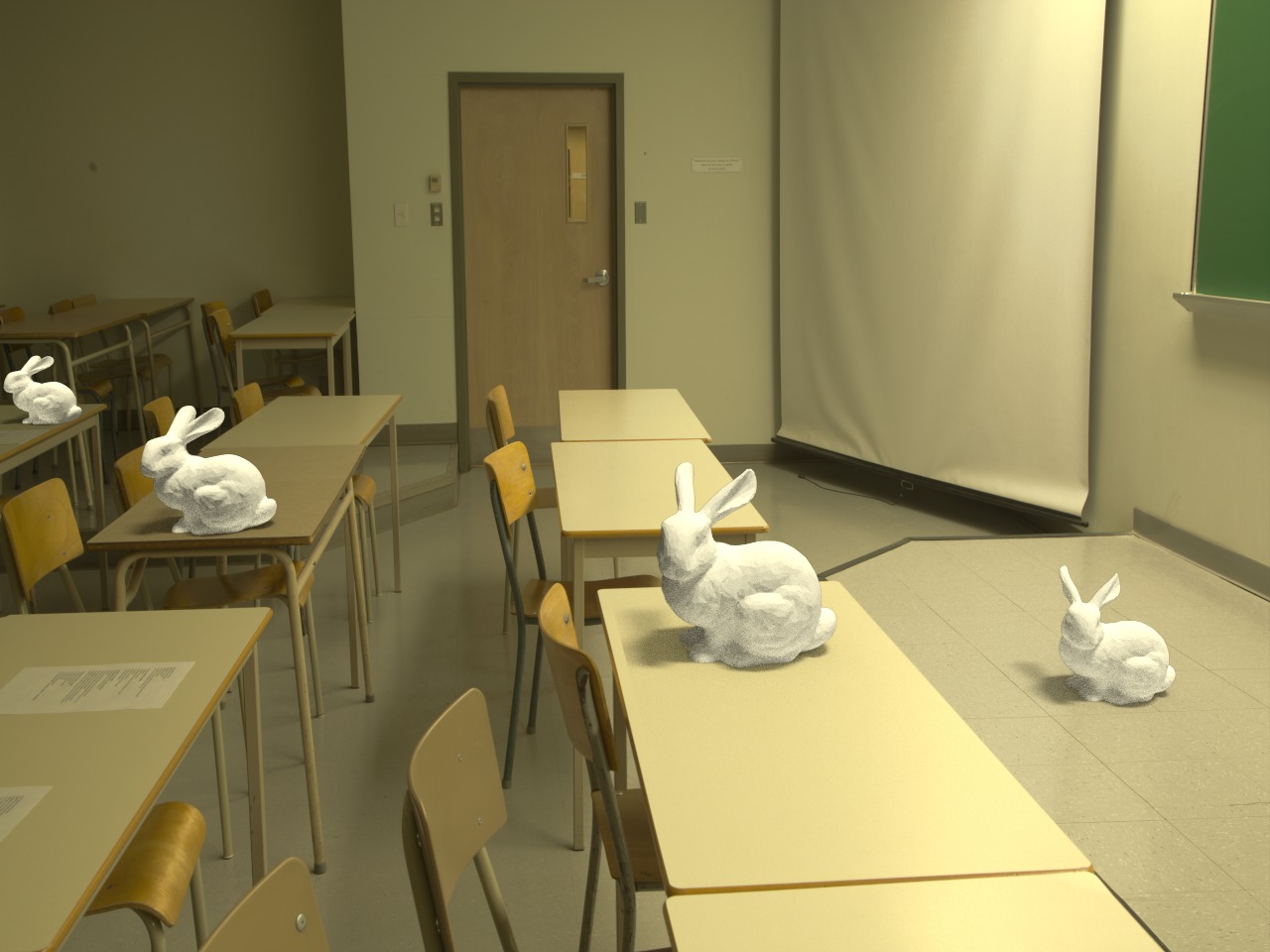





























































Comparison with Barron et al. (complement to fig. 7)
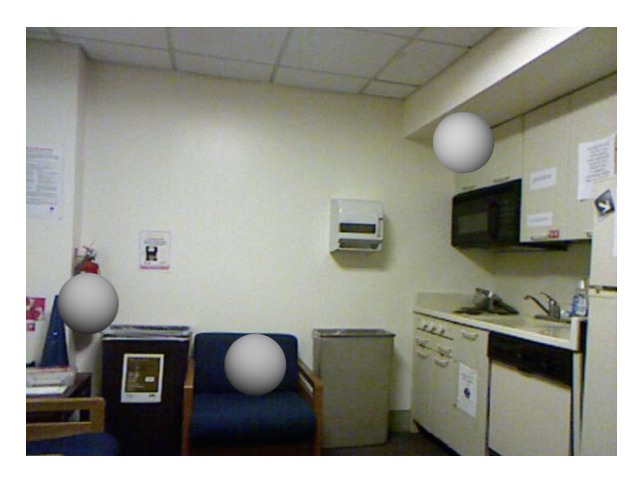





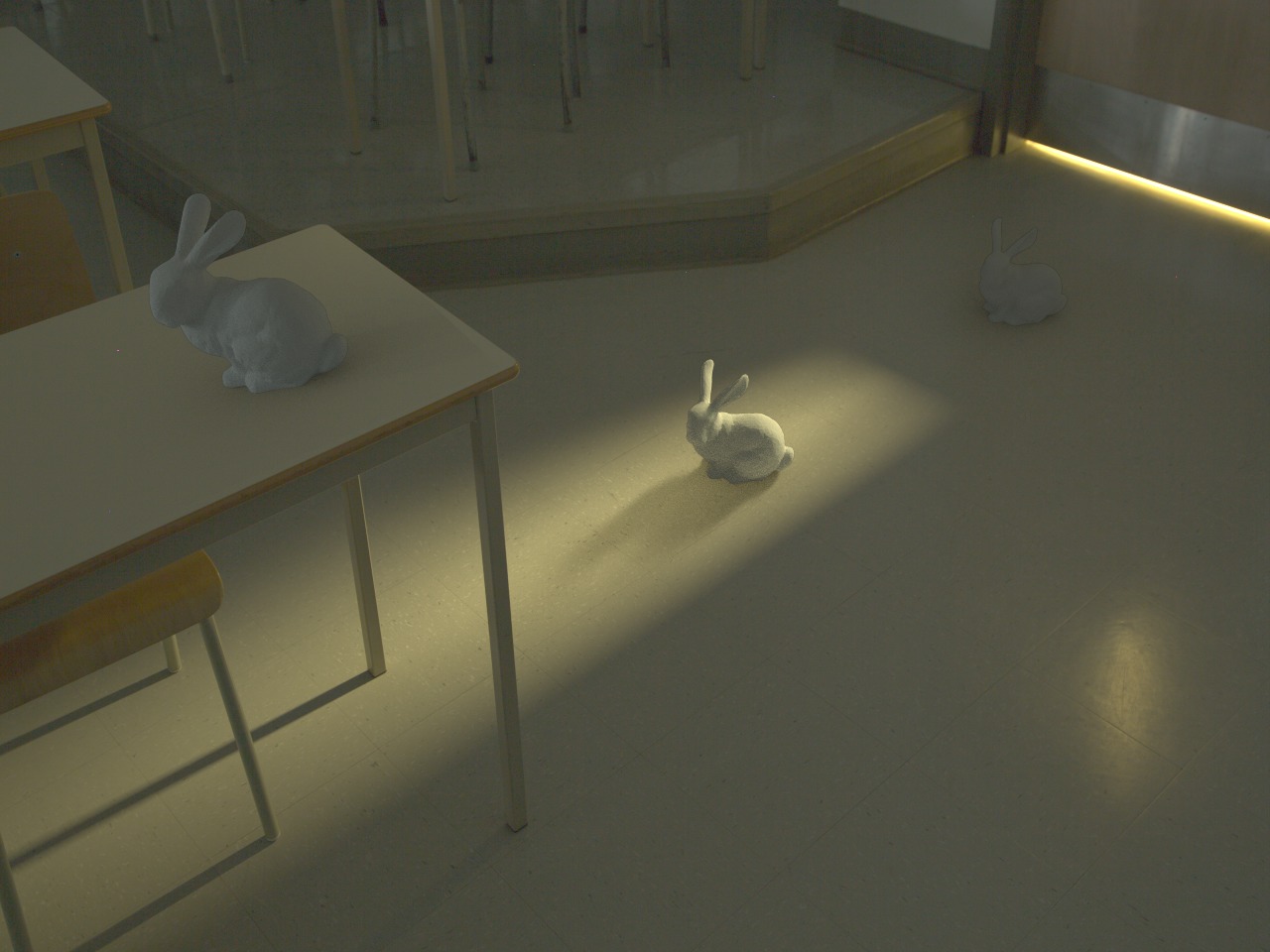
Demo
Interactive demo captured with a Kinect V2 where the illumination is computed in real-time (complement to fig. 9).
-
The depth is only used to scale the virtual object, the network only sees the RGB image to estimate the lighting.
-
Note that in this demo the shadows are not composited onto the surfaces.
Moving the object in the scene:
Moving the light source:
Videos
Synthetic scenes
Several videos from the synthetic test set. The illumination is updated interactively, the depth is used to scale the object.
-
The depth is only used to scale the virtual object, the network only sees the RGB image to estimate the lighting.
-
Note that in this demo the shadows are not composited onto the surfaces.
Real scenes
Several videos on real images. The illumination is computed interactively. A plane was fitted to simulate depth on most images.
[image source]