About
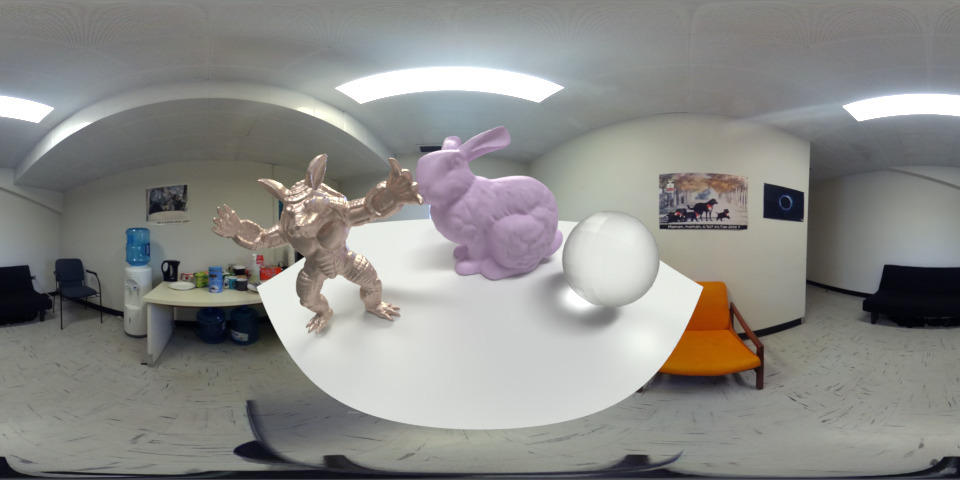
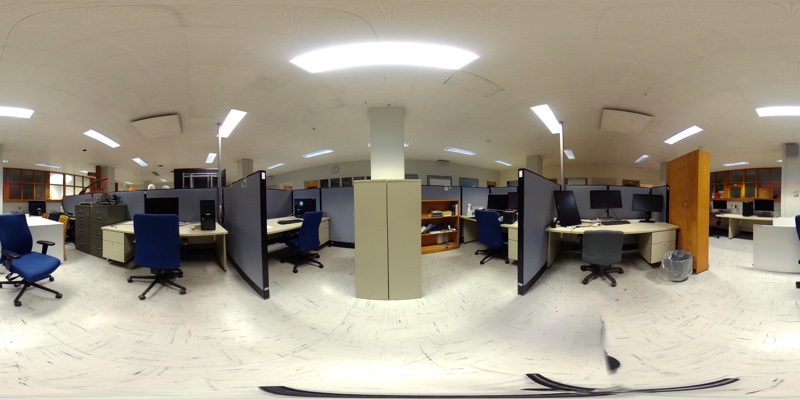
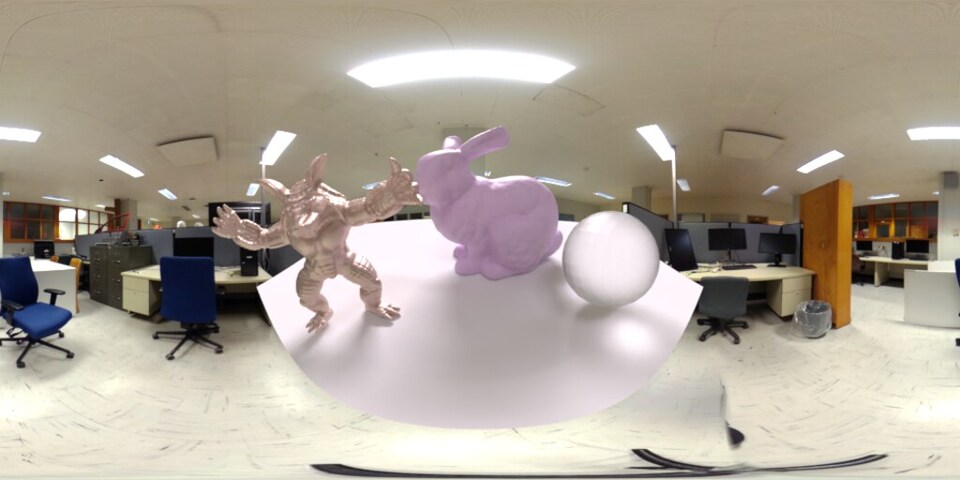
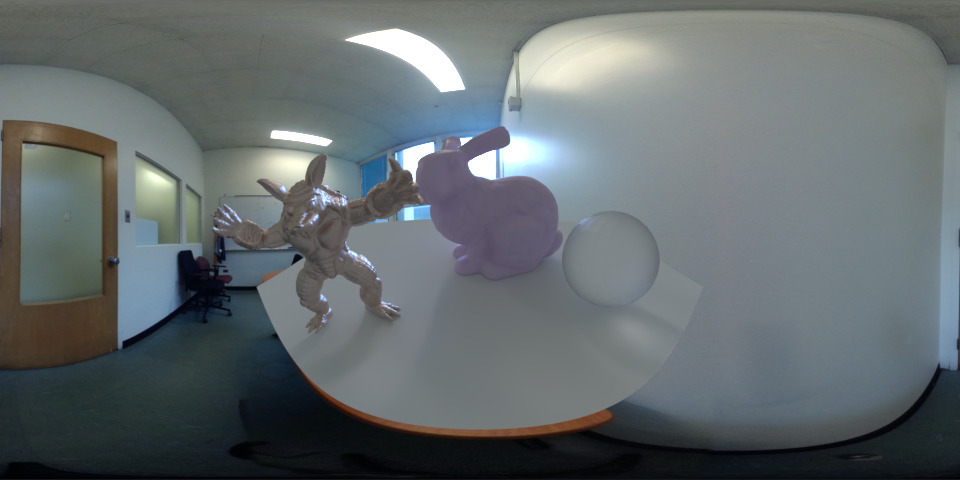
We propose the Laval PanDORA HDR Dataset, which accompanies the paper: PanDORA: Casual HDR Radiance Acquisition for Indoor Scenes. This dataset is designed to provide high-quality, spatially varying lighting data for researchers working on Image-based Lighting, HDR Novel View Synthesis, and Equirectangular Novel View Synthesis (including Gaussian Splatting).
Key Features:
- 14 Real-World Indoor Environments: Captured using a custom portable rig for realistic lighting variety.
- Dual-Exposure 360° Video: Synchronized footage recorded simultaneously at two exposure settings.
- Ground Truth HDR: Reference, unsaturated HDR panoramas obtained via a rigorous exposure-bracketing pipeline.
- Complete Metadata: Includes camera parameters, Structure-from-Motion (SfM) reconstructions, and validity masks to exclude the operator and secondary equipment.

Dataset Structure
Each scene folder follows the layout below. Structure-from-motion reconstruction was performed using OpenSfM.
<scene>/ ├── data/ │ ├── left_e1/ # Left camera, regular exposure (panoramic frames) │ ├── left_sfm/ # Left camera, frames for self-calibration │ ├── right_sfm/ # Right camera, frames for self-calibration │ ├── right_e2/ # Right camera, fast exposure (panoramic frames) │ ├── masks/ # Binary masks (per camera stream) │ │ ├── left_e1/ │ │ ├── left_sfm/ │ │ ├── right_e2/ │ │ └── right_sfm/ │ └── capture_settings.json ├── GT/ │ ├── GT_exr/ # HDR ground-truth panoramas (.exr + .png previews) │ └── GT_exr_renders/ # Rendered HDR views (.exr + .png previews) └── sfm/ └── reconstruction.json
| Path | Description | Format |
|---|---|---|
data/left_e1/ | Left 360° camera, regular exposure — input frames | PNG |
data/left_sfm/ | Left camera frames used for self-calibration | PNG |
data/right_sfm/ | Right camera frames used for self-calibration | PNG |
data/right_e2/ | Right 360° camera, fast (dark) exposure — input frames | PNG |
data/masks/ | Binary masks aligned to each camera stream | PNG |
data/capture_settings.json | Camera exposure and capture parameters | JSON |
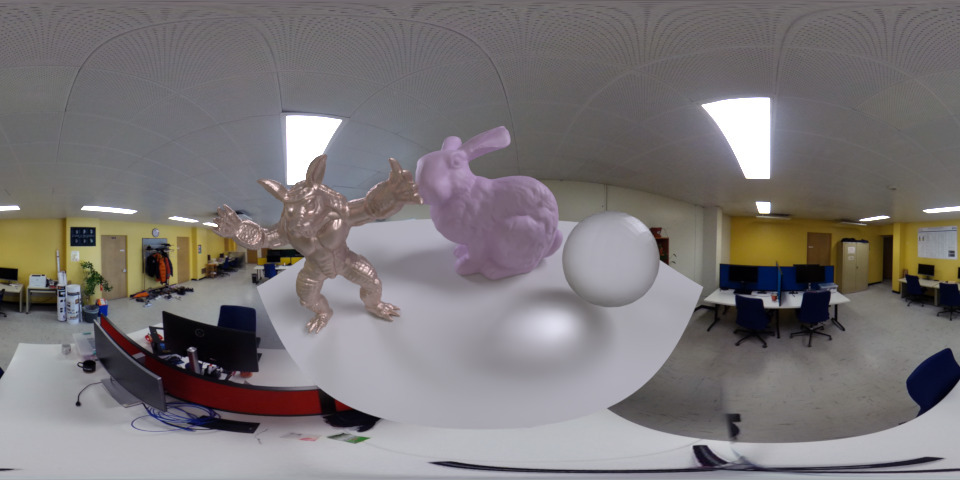
GT/GT_exr/ | HDR ground-truth panoramas (one per GT viewpoint) | EXR + PNG |
GT/GT_exr_renders/ | Rendered perspective views from GT panoramas | EXR + PNG |
sfm/reconstruction.json | OpenSfM reconstruction. See OpenSfM format docs. | JSON |
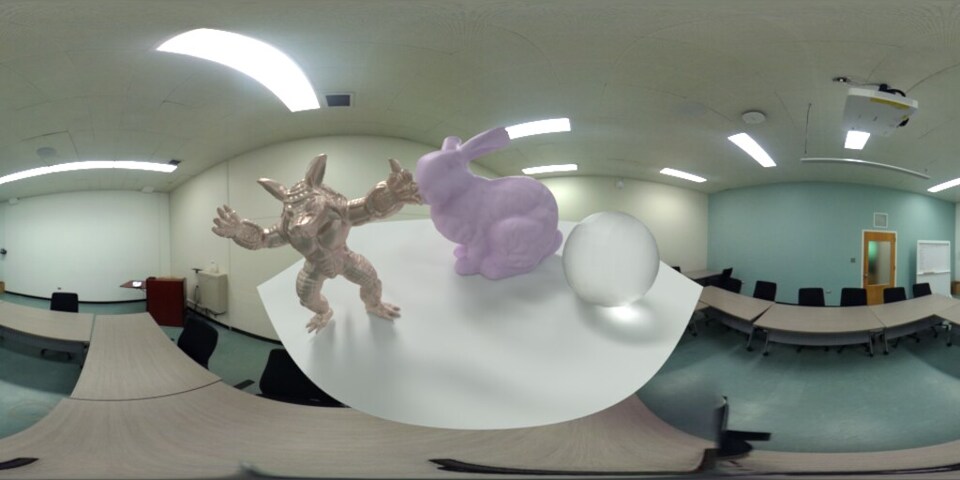
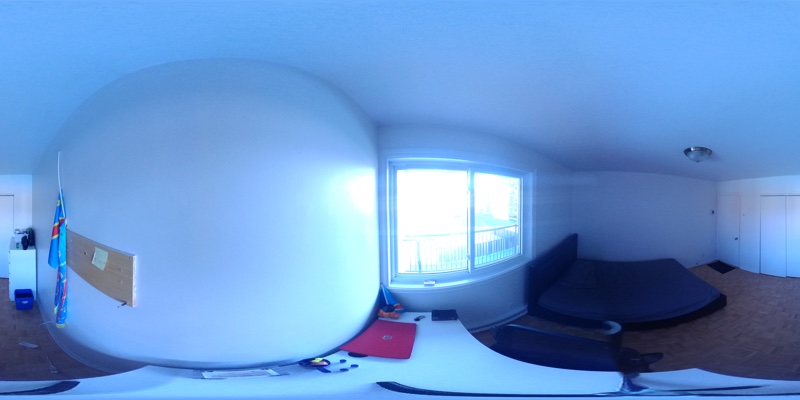
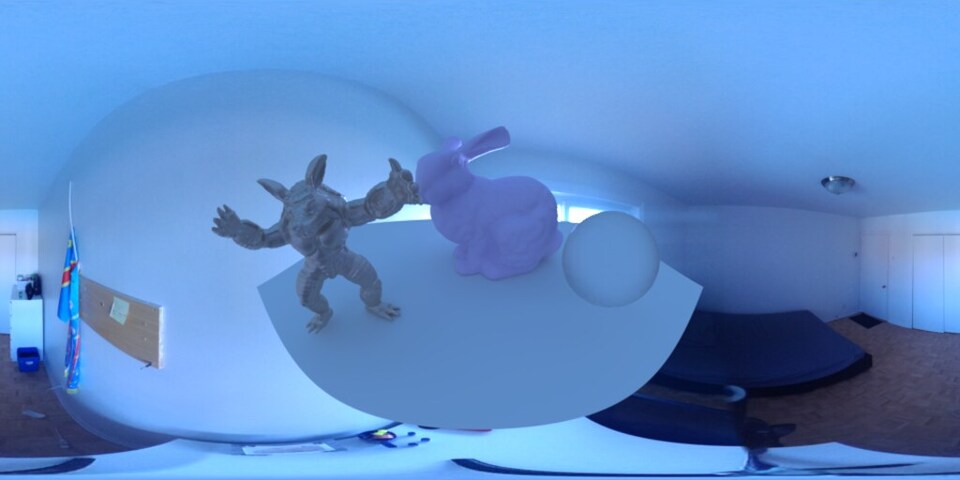
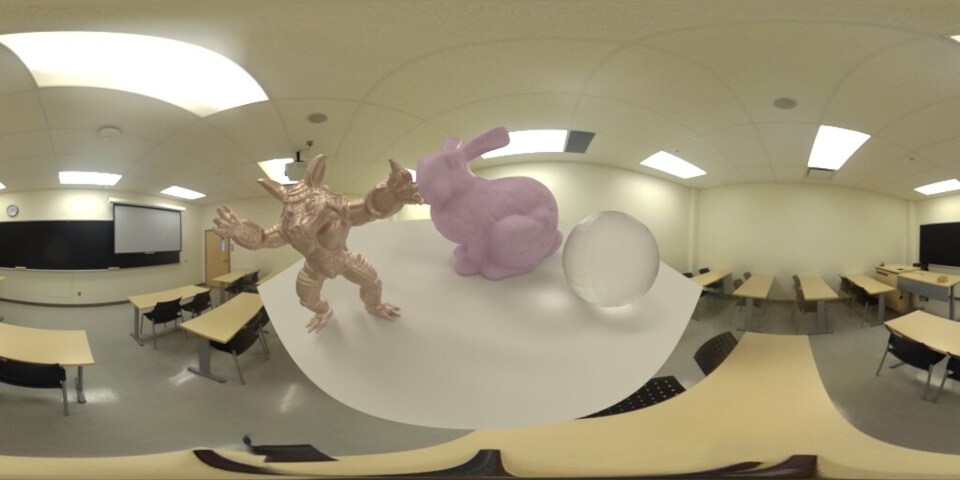
Data Preview — Auditorium
Sample frames from each data stream for the Auditorium scene. Left and right columns share the same timestamps.









Scenes
To download a scene, click on its image.


















Code
The training and evaluation code for PanDORA is currently being prepared for public release. It will include the full NeRF-based pipeline for HDR radiance acquisition from dual-exposure panoramic video, along with preprocessing scripts and evaluation utilities.
License
The Laval PanDORA HDR Dataset is released under a custom research license. By downloading or using this dataset, you agree to the following terms:
You are free to:
Use, process, and build upon this dataset for any purpose, including academic research, education, and commercial research, provided that you cite the original paper (see Citation below).
You may not:
Redistribute, re-host, mirror, or otherwise make this dataset publicly available from a source other than the official project page. Users must download the data directly from this page.
Attribution:
Any publication or work that uses this dataset must cite:
PanDORA: Casual HDR Radiance Acquisition for Indoor Scenes, Karimi Dastjerdi et al., arXiv:2407.06150.
Citation
If you use this dataset, please cite:
@misc{dastjerdi2025pandoracasualhdrradiance,
title = {PanDORA: Casual HDR Radiance Acquisition for Indoor Scenes},
author = {Mohammad Reza Karimi Dastjerdi and Dominique Tanguay-Gaudreau and Frédéric Fortier-Chouinard and Yannick Hold-Geoffroy and Claude Demers and Nima Kalantari and Jean-François Lalonde},
year = {2025},
eprint = {2407.06150},
archivePrefix = {arXiv},
primaryClass = {cs.CV},
url = {https://arxiv.org/abs/2407.06150}
}Contact
For questions about the dataset, feel free to reach out to: